![]()
![]()
![]()
![]()
Genetic algorithms (GAs) are metaheuristic optimization techniques inspired by the principles of natural selection and evolution. They operate on a population of potential solutions, applying genetic operators such as selection, crossover, and mutation to evolve better solutions over successive generations(Whitley 1994).
GAs are particularly useful for optimizing complex, non-linear functions with multiple local optima, where traditional gradient-based methods may fail(Holland 1992; Goldberg and Holland 1988).
We come out with a simple example to explore how these components
work together in our quadratic function optimization problem using
genetic.algo.optimizeR package.
The goal is to optimize the function \(f(x) = x^2 - 4x + 4\) using a genetic algorithm. The function represents a simple quadratic equation, and the goal is to find the value of \(x\) that minimizes the function.
Here’s a breakdown of the aim and the results:
Aim:
Results:
Initial Population:
Evaluation:
Selection:
Crossover and Mutation:
Replacement:
After multiple generations of repeating these steps, the genetic algorithm aims to converge towards an optimal or near-optimal solution. In this example, since it’s simple and the solution space is small, we could expect the algorithm to converge relatively quickly towards the optimal solution \(x = 2\), where \(f(x) = 0\).
library(genetic.algo.optimizeR)
# Initialize population
population <- initialize_population(population_size = 3, min = 0, max = 3)
print("Initial Population:")
#> [1] "Initial Population:"
print(population)
#> [1] 3 0 2
generation <- 0 # Initialize generation/reputation counter
while (TRUE) {
generation <- generation + 1 # Increment generation/reputation count
# Evaluate fitness
fitness <- evaluate_fitness(population)
print("Evaluation:")
print(fitness)
# Check if the fitness of every individual is close to zero
if (all(abs(fitness) <= 0.01)) {
print("Termination Condition Reached: All individuals have fitness close to zero.")
break
}
# Selection
selected_parents <- selection(population, fitness, num_parents = 2)
print("Selection:")
print(selected_parents)
# Crossover and Mutation
offspring <- crossover(selected_parents, offspring_size = 2)
mutated_offspring <- mutation(offspring, mutation_rate = 0) # (no mutation in this example)
print("Crossover and Mutation:")
print(mutated_offspring)
# Replacement
population <- replacement(population, mutated_offspring, num_to_replace = 1)
print("Replacement:")
print(population)
}
#> [1] "Evaluation:"
#> [1] 1 4 0
#> [1] "Selection:"
#> [1] 2 3
#> [1] "Crossover and Mutation:"
#> [1] 2 2
#> [1] "Replacement:"
#> [1] 2 0 2
#> [1] "Evaluation:"
#> [1] 0 4 0
#> [1] "Selection:"
#> [1] 2 2
#> [1] "Crossover and Mutation:"
#> [1] 2 2
#> [1] "Replacement:"
#> [1] 2 2 2
#> [1] "Evaluation:"
#> [1] 0 0 0
#> [1] "Termination Condition Reached: All individuals have fitness close to zero."
print(paste("Total generations/reputations:", generation))
#> [1] "Total generations/reputations: 3"The above example illustrates the process of a genetic algorithm, where individuals are selected, crossed over, and replaced iteratively to improve the population towards finding the optimal solution(i.e. fitting population).
In theory
Initialize Population:
population <- c(1, 3, 0)
population
#> [1] 1 3 0Evaluate Fitness:
Calculate fitness(f(x)) for each individual:
Coding the function f(x) in R A quadratic function is a function of the form: ax2+bx+c where a≠0
So for:
\[ f \left(x\right) = x^2 - 4x + 4 \]
In R, we write:
a <- 1
b <- -4
c <- 4
f <- function(x) {
a * x^2 + b * x + c
}Plotting the quadratic function f(x) First, we have to choose a domain over which we want to plot f(x).
Let’s try 0 ≤ x ≤ 3:
# domain over which we want to plot f(x)
x <- seq(from = 0, to = 4, length.out = 100)
# plot f(x)
plot(x, f(x), type = "l") # type = 'l' plots a line instead of points
# plot the x and y axes
abline(v = 0, h = 0, col = "skyblue", lty = 3)
points(c(1, 3), c(f(1), f(3)), col = "coral1", pch = 8, cex = 1.5, lty = 3)
text(c(1, 3), c(f(1), f(3)), labels = c("(x=1, f(x=1))", "(x=3, f(x=3))"), pos = 3)
points(c(0), c(f(0)), col = "blue", pch = 8, cex = 1.5, lty = 3)
text(c(0), c(f(0)), labels = "(x=0, f(x=0))", pos = 4, font = 2)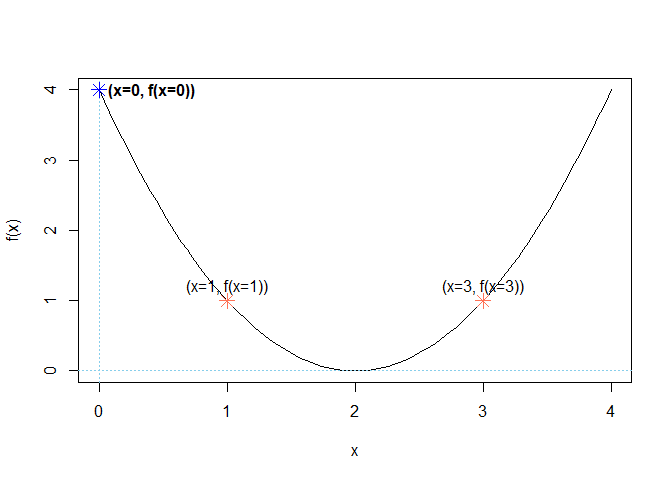
Select parents for crossover:
# plot f(x)
plot(x, f(x), type = "l") # type = 'l' plots a line instead of points
# plot the x and y axes
points(c(1, 3), c(f(1), f(3)), col = "coral1", pch = 8, cex = 2, lty = 3)
text(c(1, 3), c(f(1), f(3)), labels = c("(x=1, f(x=1))", "(x=3, f(x=3))"), pos = 3, font = 2)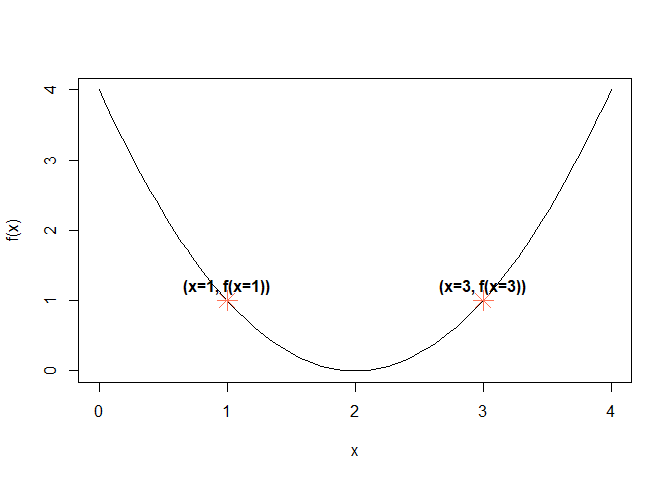
The optimal/fitting individuals F of a quadratic equation, in this case the lowest point on the graph of f(x), is:
\[ F\left(\frac{-b}{2a}, f\left(\frac{-b}{2a}\right)\right) \]
find.fitting <- function(a, b, c) {
x_fitting <- -b / (2 * a)
y_fitting <- f(x_fitting)
c(x_fitting, y_fitting)
}
F <- find.fitting(a, b, c)Adding the Fitting to the plot:
# plot f(x)
plot(x, f(x), type = "l") # type = 'l' plots a line instead of points
# plot the x and y axes
abline(h = 0)
abline(v = 0)
# add the vertex to the plot
points(
x = F[1], y = F[2],
pch = 18, cex = 2, col = "red"
) # pch controls the form of the point and cex controls its size
# add a label next to the point
text(
x = F[1], y = F[2],
labels = "Fitting", pos = 3, col = "red", font = 10
) # pos = 3 places the text above the point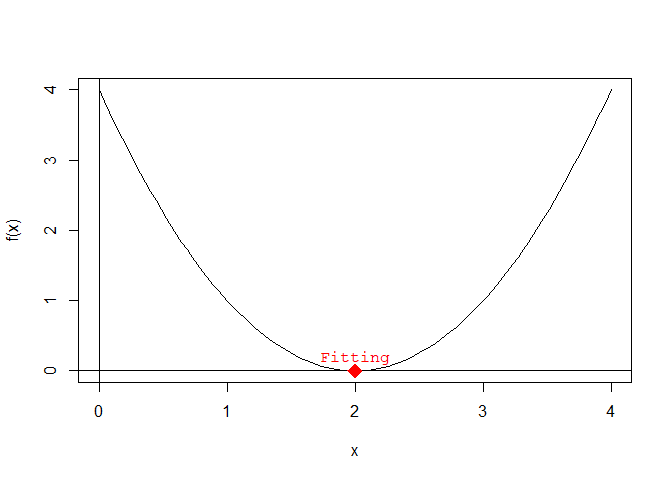
Existing alternative solution
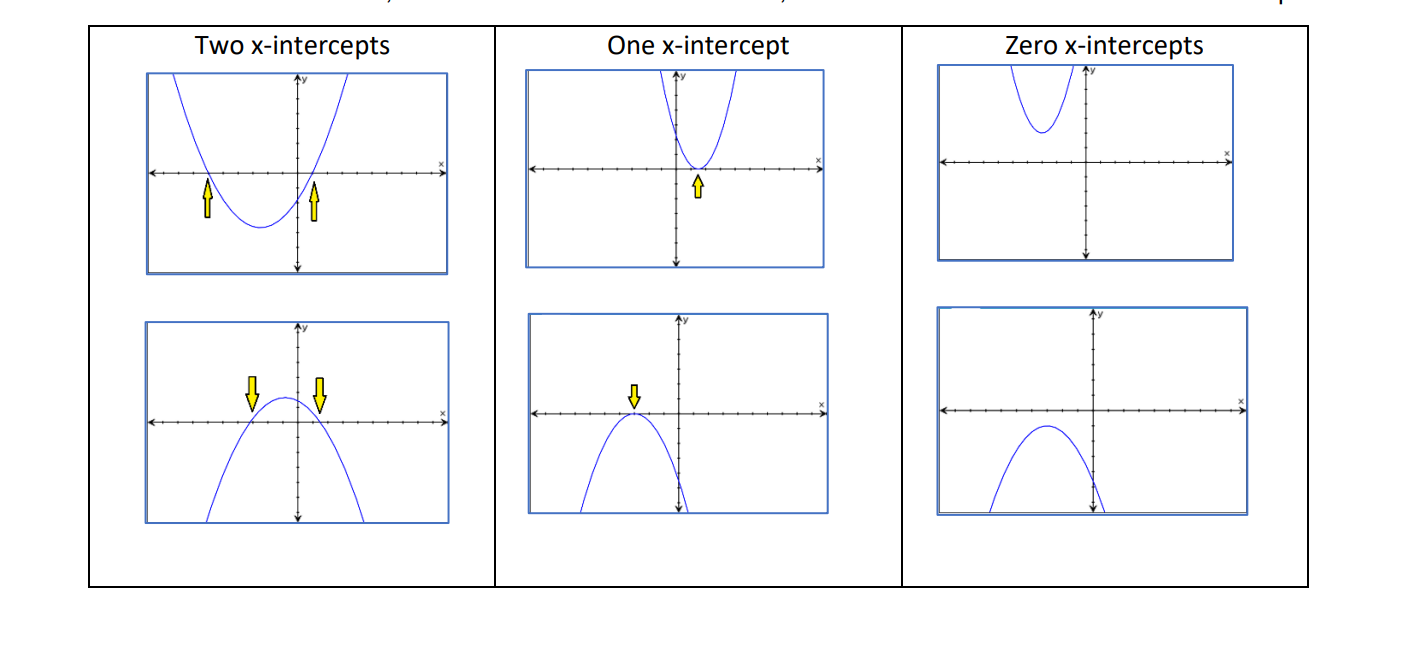
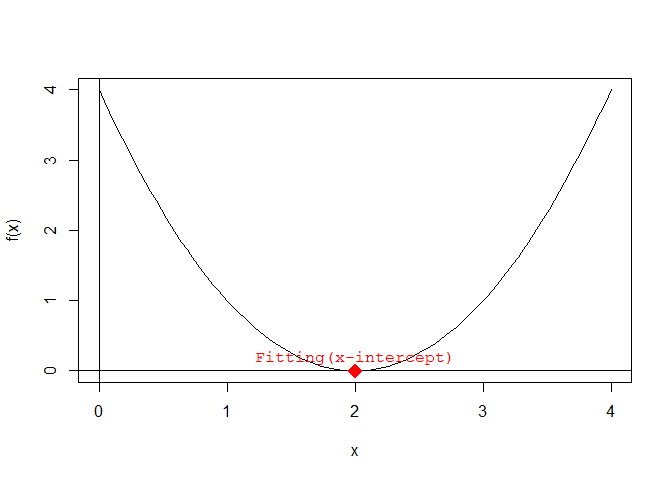
Finding the x-intercepts of f(x)
The x-intercepts are the solutions of the quadratic equation f(x) = 0; they can be found by using the quadratic formula:
\[ x = \frac{-b \pm \sqrt{b^2 - 4ac}}{2a} \]
The quantity \(b2–4ac\) is called the discriminant:
# find the x-intercepts of f(x)
find.roots <- function(a, b, c) {
discriminant <- b^2 - 4 * a * c
if (discriminant > 0) {
c((-b - sqrt(discriminant)) / (2 * a), (-b + sqrt(discriminant)) / (2 * a))
} else if (discriminant == 0) {
-b / (2 * a)
} else {
NaN
}
}
solutions <- find.roots(a, b, c)Adding the x-intercepts to the plot:
# plot f(x)
plot(x, f(x), type = "l") # type = 'l' plots a line instead of points
# plot the x and y axes
abline(h = 0)
abline(v = 0)
# add the x-intercepts to the plot
points(
x = solutions, y = rep(0, length(solutions)), # x and y coordinates of the x-intercepts
pch = 18, cex = 2, col = "red"
)
text(
x = solutions, y = rep(0, length(solutions)),
labels = rep("Fitting(x-intercept)", length(solutions)),
pos = 3, col = "red", font = 10
)
We has demonstrated the application of genetic algorithm concepts to optimize a quadratic function. We’ve explored population initialization, fitness evaluation, selection, and visualization of results. We’ve also delved into the theoretical aspects of quadratic functions, including finding the optimal solution and x-intercepts.
Future developments could include:
By understanding these fundamental concepts and their implementation, we can take advantage of genetic algorithms for a wide range of optimization problems across various domains.
While our example focuses on single-objective optimization, genetic algorithms are particularly powerful for multi-objective problems. In such cases, the concept of Pareto optimality is used to evaluate solutions, and techniques like NSGA-II (Non-dominated Sorting Genetic Algorithm II) can be employed(Deb et al. 2002).
The performance of genetic algorithms can be sensitive to parameter settings (e.g., mutation rate, crossover probability). Adaptive parameter control techniques adjust these parameters dynamically during the optimization process, potentially improving convergence and solution quality.
Genetic algorithms are inherently parallelizable. Implementing parallel versions of selection, crossover, and mutation operations can significantly reduce computation time for large-scale optimization problems.
Currently only the fundamental concepts and implementation of genetic
algorithms are used in the genetic.algo.optimizeR package.
By following these steps and understanding the underlying principles,
users can apply this powerful optimization technique to a wide range of
problems in fields such as engineering, finance, and bioinformatics.
Future developments of the package may include:
I would encourage the users to experiment with different parameter settings and problem formulations to gain deeper insights into the behavior and capabilities of genetic algorithms.